ACアダプター
バッテリーハブをUSB Cに単体で接続したとき
15.5V 3.7Aの電流が流れていた。

バッテリーハブの許容は 20V 5AなのでこのACで許容できない選択肢はない。
バッテリー充電ハブに流れている電流の電圧は15.5Vだったので、ほぼバッテリーの定格電圧になる。1C=5Aなので 3.7Aは0.75C相当。
およそ1.33Hで満充電 つまり1時間20分で満充電となる計算。

USB AのポートでRCPROを充電すると以下の通り。
16%(10分)ほど充電時間が長くなる計算。

ACアダプター
バッテリーハブをUSB Cに単体で接続したとき
15.5V 3.7Aの電流が流れていた。
バッテリーハブの許容は 20V 5AなのでこのACで許容できない選択肢はない。
バッテリー充電ハブに流れている電流の電圧は15.5Vだったので、ほぼバッテリーの定格電圧になる。1C=5Aなので 3.7Aは0.75C相当。
およそ1.33Hで満充電 つまり1時間20分で満充電となる計算。
USB AのポートでRCPROを充電すると以下の通り。
16%(10分)ほど充電時間が長くなる計算。

直流マーク

直流 17.6V 3.41A =60W
直流 17.0V 3.53A =60W
Main 直流60W供給される
USB TypeAとMicro USBは併せて5V 2.0A=10W供給される
供給できる最大の電力は60W。つまりUSBで充電すると、メインの電力が50Wまで落ちる。


中国RoHSのマークで、数字は使用年数の制限を表している。

二重絶縁 この回マークは、二重絶縁、つまり基礎絶縁と補助絶縁の二重の絶縁対策、或いは強化絶縁対策が施されていることを表しています。(IEC safety class II)

INPUT(最大値) 直流 17.6V 5.7A =100W
手前のACアダプターからは17.6V 3.41Aまでしか供給できないので、最速で充電されていても電流は3.41Aまでしか流れていないのだろう。
さて、これらの充電器を使用するバッテリーとは、、、

定格の電圧はバッテリーの種類(素材)によって異なる
Lipoバッテリーを安全に使える電圧は以下の通り
下限 定格電圧-0.5v=3.2v(以下は過放電)
中間 定格電圧(3.7v)
上限 定格電圧+0.5v=4.2v(以上は過充電)
LipoHVバッテリーを安全に使える電圧は以下の通り
Lipoの特性 ⇒ 一気に電流を流せるパワーがある Current 単位は「C」
1Cはバッテリーに表記されているmAhのhをとった「mA」のこと
下限 定格電圧-0.5v=3.35v(以下は過放電)
中間 定格電圧(3.85v)
上限 定格電圧+0.5v=4.35v(以上は過充電)
MAVIC2バッテリーの表記は以下の通り
MaxChaargeVoltage 17.6v⇒上限
NormalVoltage 15.4v⇒定格
Mavic2のバッテリーは、4cellなので 17.6/4=4.4v 15.4/4=3.85v(定格電圧)
HVバッテリーのようです。
3850mAh*15.4V=59.29wh
結論
※このバッテリーの「1C」は3850mAになる。→DischargeCurrent 放電能力はDJIより公表されていない。ログより凡その値は解析できるかもしれない。
※充電について ① 1C 3.85A ② 満充電の電圧 4.35Vで充電すると1時間で充電できる。
※純正バッテリー充電機を使用すると 3.41A 17.6Vなので 3.85/3.41=1.12h=1h10minで充電完了する。
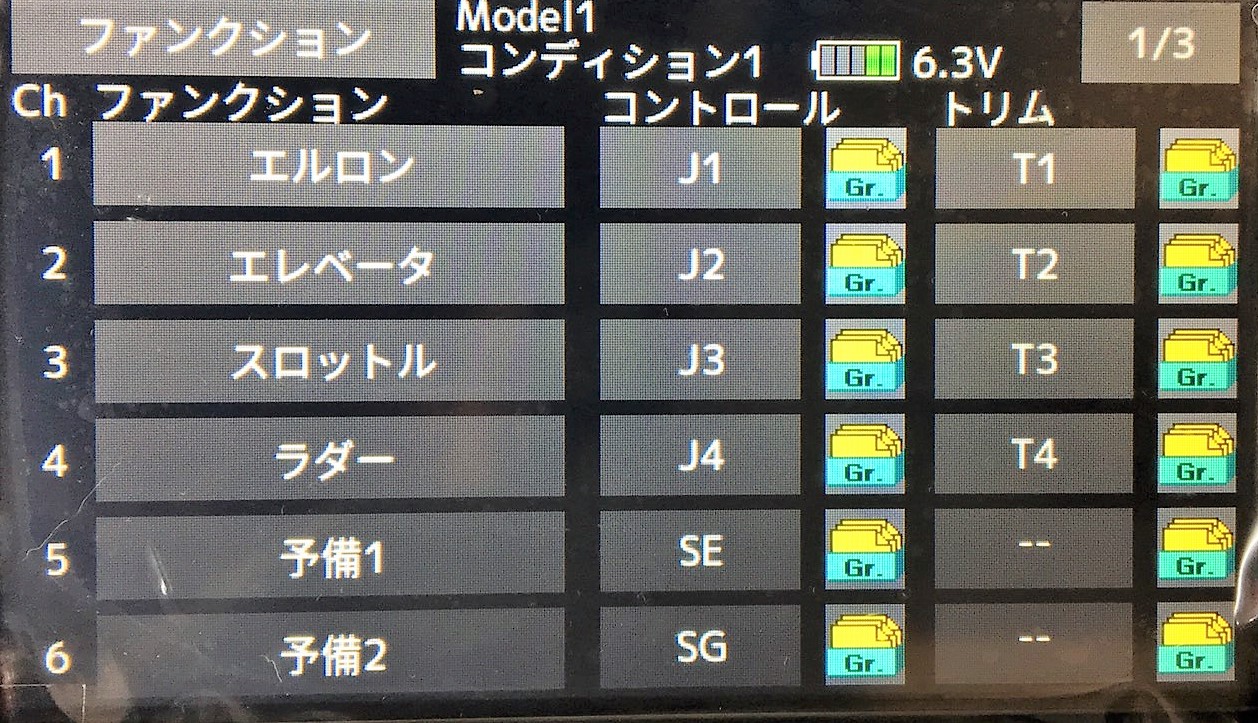
受信機設定
スティック「低」 1000 スティック「高」2000

上記表示と異なる場合は「futaba」を選択する


次にプロポの「サブトリム」を使用してエンドポイントの調整をする。
T16SZ
「リンケージメニュー」→「サブトリム」

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

betaflight configuratorで送信機のプロコトルを設定する
機体をUSBで接続してから、「SPIバス受信プロコトル」で「SFHSS」を選択する。

マルチコプター

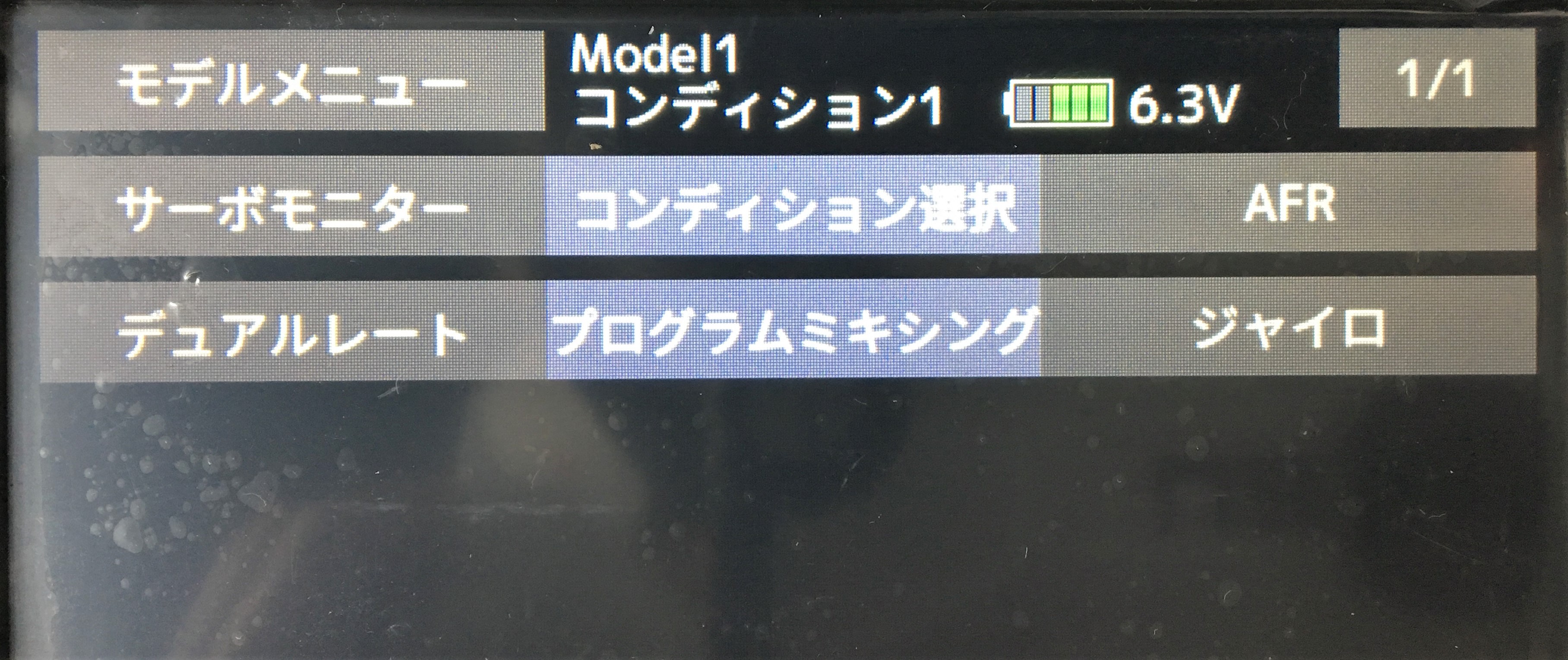
左側中央の『リンケージメニュー』を選択し、
右上の『モデルタイプ』左下の『マルチコプター』
サーボリバース

↑FUTABAから返却された状態
左上から2番目の『サーボリバース』
『1 エルロン』は『ノーマル』
『2 エレベータ』は『リバース』
『3 スロットル』は 『リバース』
『4 ラダー』は『ノーマル』
『5 フラップ』は 『リバース』
エンドポイント

↑FUTABAから返却された状態
返却時のまま120で変更せず。何も触らず。
『1 エルロン』から『4 ラダー』まで、もともと100だった内側の値『動作量』を125にします。外側の『135』は、そのままにします。
スイッチの割り当て
『リンケージメニュー』に戻って『ファンクション』
モード2の場合は、
『5』を『予備1』(『ジャイロ』以外でお好みで)『SE』に、
『6』を『予備2』『SG』に、
『7』を『予備3』『SF』に
『8 』を『予備4』『SH』に
それぞれに変更します。
モード1の場合は、
『エレベータ』を『J3』『T3』に、『スロットル』を『J2』『T2』にしてください。


 ↑フタバから返却された状態 変更せず。
↑フタバから返却された状態 変更せず。
フェールセーフ
プロポの電源を切ったときに、機体が止まるように設定できます。

↑フタバから返却された状態 変更せず。
電波の方式の設定
『リンケージメニュー』に戻って
『システムタイプ』
今回は『S-FHSS』を選択して設定を終了します。
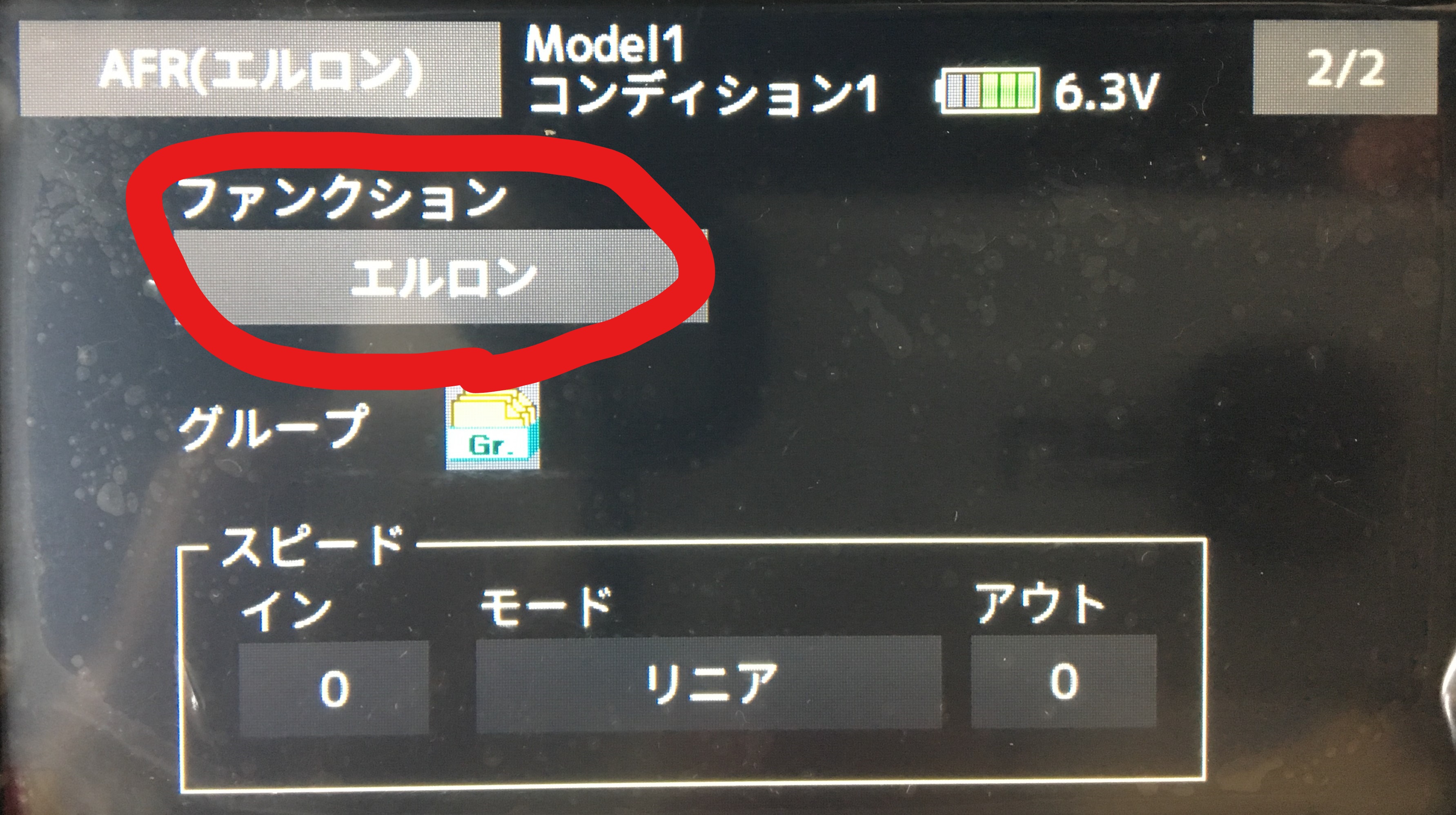
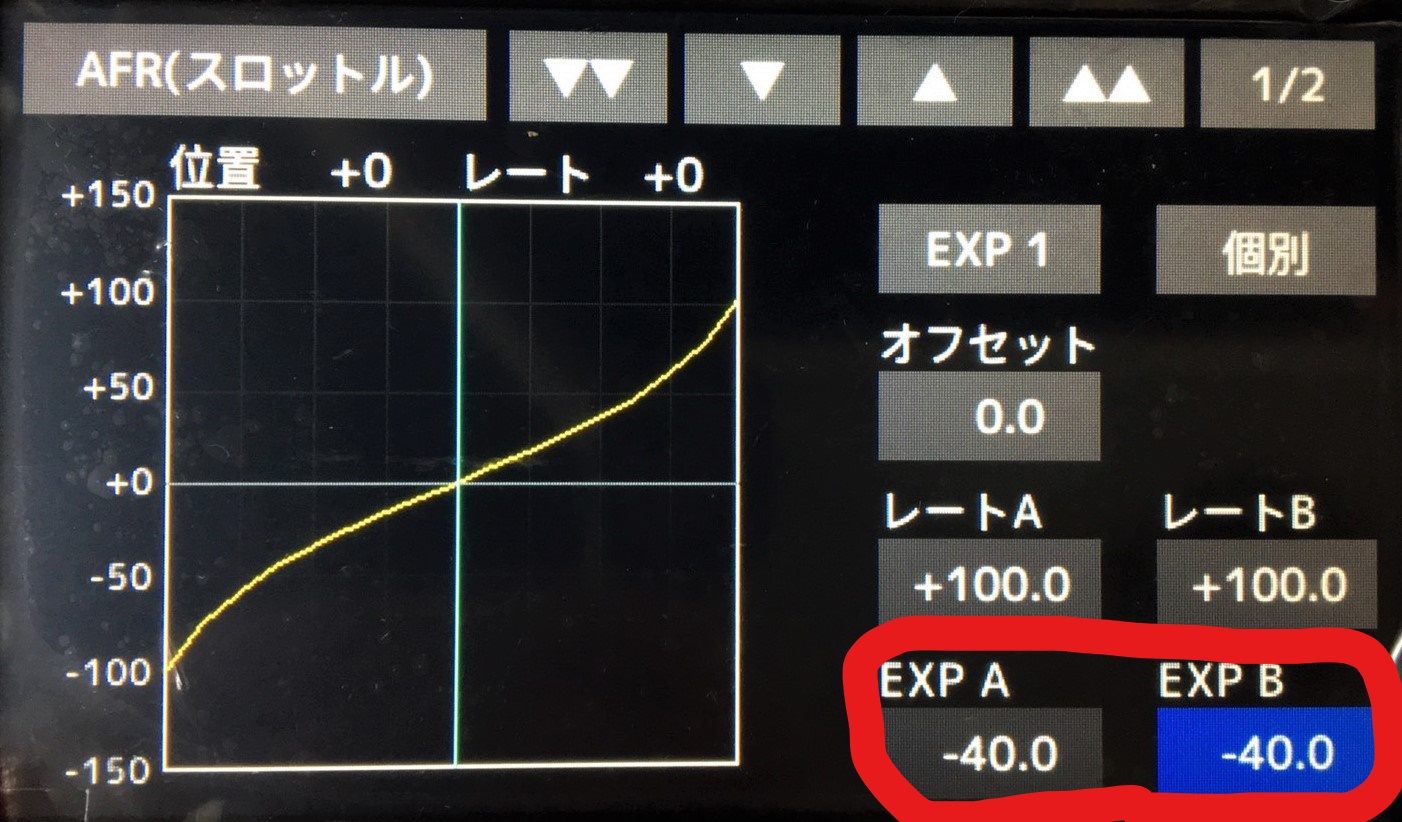
AFR
右側の『MULTICOPTER』を押します。
右上の『AFR』を選択します。
『スロットル』以外の『エルロン』『エレベーター』『ラダー』の『EXP A』『EXP B』を『-30.0』にします。
『スロットル』は『-40.0』にします。
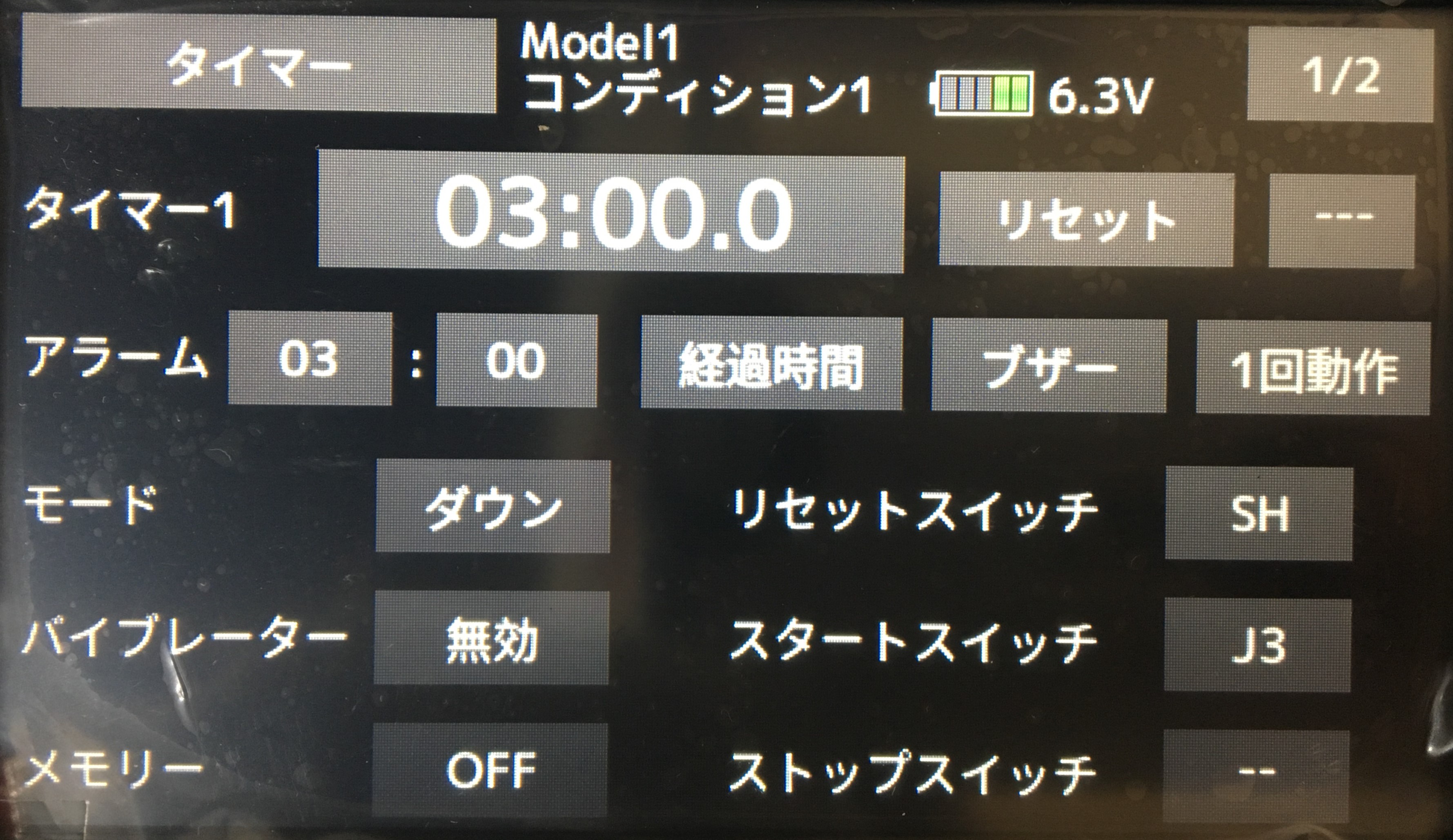
タイマー
モード2の場合、私はこのように設定しています。
『スタートスイッチ』では、『J3』を選択する時の画面で『リバース』にします。
モード1の場合は、『J3』ではなく『J2』にします。
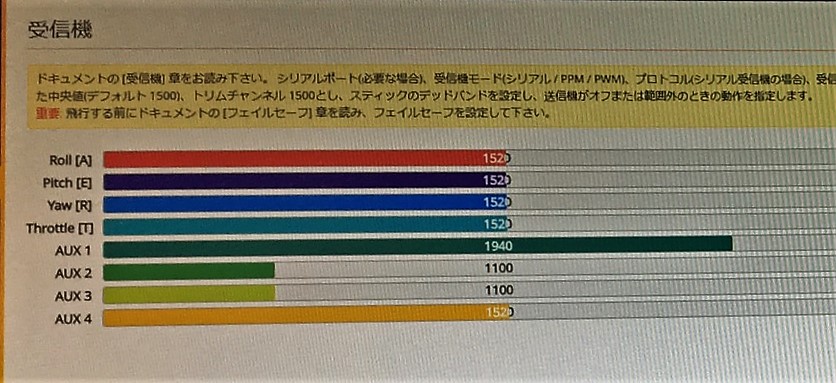
『Beta Flight』での確認
『受信機』の中央値が1520前後(+-5程度)になっているか、各スイッチが正常に作動するか確認します。

AC/DC入力対応
AC入力でもハイパワーの300Wの為、安定化電源を必要としません
ワイヤレス充電機能搭載で対応するスマートフォンを置くだけで充電
USB搭載でこちらからも周辺機器などの充電も可能
機能・仕様
・600W 16A デュアル バランス充電器
・入力電圧: AC 100-120V(海外では注意)
DC 9.0-32.0V(12,24v使用可)
・出力電圧: 0.1~30V
・出力電流: 0.1~16A x2
・出力電力: AC:300W(CH1+CH2=300W) DC:300W×2
・放電電流: 0.1-3.0A
・バランス電流 : 最大 1000mA/cell
・対応バッテリー: LiPo/LiHv/LiFe/Lilon: 1-6S
NiCd/NiMH: 1-16S
鉛バッテリー: 2~24V 1~12S
・USB搭載:5V/2.1A
・スマートフォンワイヤレスチャージャー内蔵 ※対応していないスマートフォンもございます。
充電電流MAX10W 対応機種:iPhoneX iPhoneXS samsung S8 Huawei P30 Pro Xiaomi9 等
・サーボテスト機能内蔵 ※SRモード、760μsモードのサーボは対応していません。
・言語:English(英語)、Deutsch(ドイツ語)、Francais(フランス語)、 日本語、簡体中文、繁體中文
・LCDスクリーン:3.5インチ 480x320
・寸法、重量: 125x119x76mm 790g

Engineer ネジザウルス: https://amzn.to/2WejX99
Engineer ラジオペンチ: https://amzn.to/31Ov9u7
Engineer ニッパー: https://amzn.to/2BLvbIL
Vessel ストリッパー: https://amzn.to/2BMh9qi
SK11 ミニサイズ万能ハサミ: https://amzn.to/2JtUQdn
日東 アセテート粘着テープ 19mmx20m: https://amzn.to/2Jr7Ccm
3Mスコッチ 超強力両面テープ 19mm:
fujiya ヒッポケース S:
http://www.fujiya-kk.com/ja/products/...
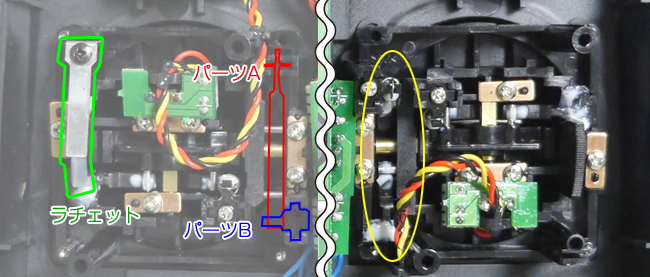
Engineer プチラチェット:
Hozan ピンセットP891:
TS-101 はんだごて
RFメーター immersion RC
KBF-100100C(BK)タイラップ 100*2.5mm

MOBULA 6を選択
Quad Settings で Camera Mix Angle を0にする(デフォルトは0ではない)
CameraAngleは25度に変更した。